Answer Summary
Low-light visibility does not automatically mean low-light usability. For UAV and robotics systems, low-light performance should be evaluated by whether the image preserves edges, contrast, motion cues, and scene readability under real operating conditions.
Core Engineering Judgment
Low-light performance is valid only when the image preserves edges, contrast, motion cues, and scene readability.
Quick Evaluation Checklist
Before selecting a low-light camera module, engineers should evaluate:
- Can the image preserve object edges?
- Is surface contrast still readable?
- Does noise reduce decision confidence?
- Are motion cues still visible?
- Can the system handle backlight?
- Does strong-light suppression prevent highlight overload?
- Is the image useful for decisions, not just visible?
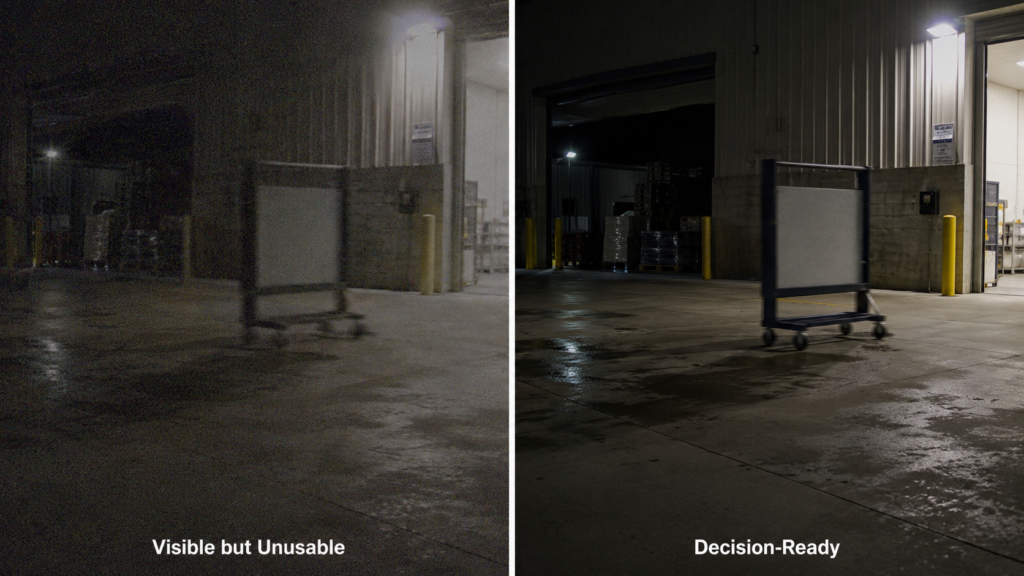
Visibility Is Not Enough
Many camera modules can produce an image in low light.
That does not mean the image is useful.
For UAV inspection, robotics operation, and remote visual control, the real question is not:
“Can the camera see something?”
The better question is:
“Can the image still support a reliable decision?”
A visible image can still be operationally weak if it loses edge detail, depth cues, contrast, or motion readability.
Definition: Low-Light Decision Clarity
Low-light decision clarity means the image preserves enough visual information for an operator or system to make a reliable decision in low-light, backlit, or high-contrast environments.
It is not only about brightness.
A brighter image can still be noisy.
A visible image can still be unreadable.
A high-sensitivity sensor can still fail if the scene cannot support judgment.
For UAV systems, low-light performance should be judged by operational readability, not image brightness alone.
Why Brightness Alone Can Mislead
Some low-light systems increase brightness but lose important visual information.
Common problems include:
- soft object boundaries
- heavy noise
- unclear motion
- washed-out highlights
- weak surface contrast
- lost foreground detail under backlight
- reduced depth perception
In consumer imaging, this may only reduce image quality.
In UAV and robotics workflows, it can reduce decision reliability.
If an operator cannot quickly understand the scene, the feed is not decision-ready.
Why Low-Light Matters in UAV and Robotics Workflows
Low-light performance becomes critical in:
- night operation
- early morning or late evening inspection
- perimeter monitoring
- indoor robotics
- industrial facilities
- backlit infrastructure scenes
- mixed-light environments
The hardest scenes are often not completely dark.
They are mixed-light scenes: dark areas, bright lamps, reflective surfaces, sky backlight, shadows, and moving objects appearing together.
That is why low-light evaluation should include HDR, WDR, strong-light suppression, backlight compensation, and noise behavior.
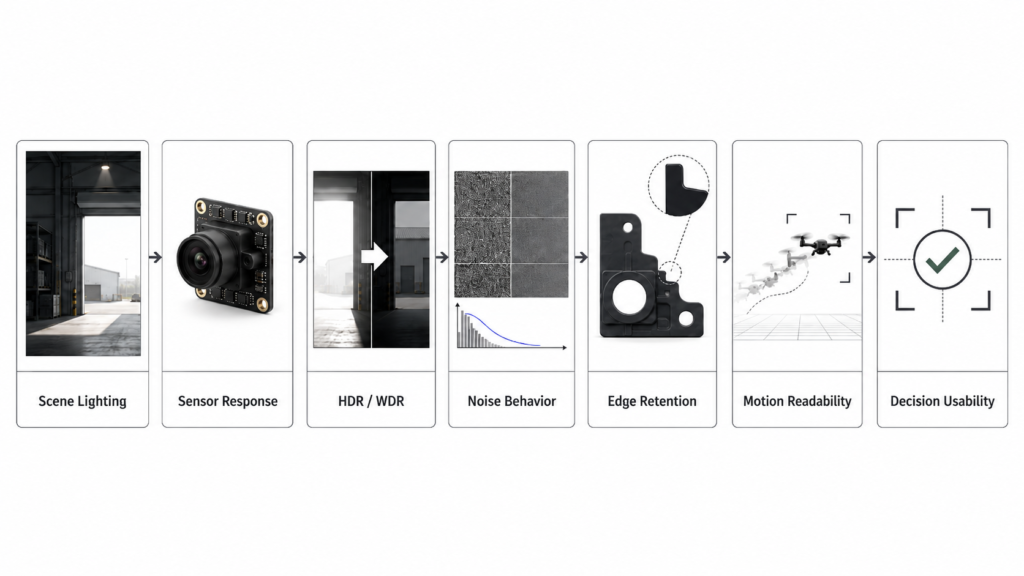
What Engineers Should Test
A practical low-light evaluation should include:
1. Edge Retention
Can the module preserve object boundaries in dark or mixed-light scenes?
2. Contrast
Can the image still show useful structure and surface separation?
3. Motion Readability
Can moving objects or moving platforms still be interpreted?
4. Noise Behavior
Does noise interfere with judgment?
5. Backlight Handling
Can the system preserve foreground detail under bright background light?
6. Strong-Light Suppression
Can the module control glare or highlight overload?
7. Decision Usability
Can the operator make a timely and confident decision from the feed?
What To Ask Your Supplier
Before selecting a low-light module, ask:
- Is the low-light claim based on sensor sensitivity or real scene usability?
- Does the module support HDR or WDR?
- How does it perform under backlight?
- Is strong-light suppression available?
- What happens to noise when gain increases?
- Can imaging parameters be tuned for the target environment?
- Can the module be tested in scenes similar to our application?
These questions separate low-light marketing from low-light engineering.
Where Thyraon Is Relevant
Thyraon is relevant when a UAV or robotics project requires low-light image usability, high-contrast scene readability, and compact embedded vision integration.
Depending on the selected module and project requirements, Thyraon module options can support HDR, WDR, low-light imaging, backlight compensation, strong-light suppression, and noise reduction.
The exact imaging configuration should be confirmed based on lighting conditions, field of view, resolution, frame rate, interface, and target application.
Engineering Conclusion
Low-light quality should be measured by decision clarity, not brightness alone. If edges, contrast, motion cues, and scene structure are lost, the image is visible but not operationally usable.
A visible image is not always a usable image.
FAQ
Is a brighter low-light image always better?
No. A brighter image can still be noisy, blurred, or unreadable.
Why does HDR matter for UAV vision?
HDR helps preserve information in high-contrast scenes where bright and dark areas appear together.
What is the difference between visibility and usability?
Visibility means the camera can produce an image. Usability means the image contains enough reliable information for action or judgment.
Should low-light testing include motion?
Yes. UAVs and robots operate in motion, so low-light performance should be tested under movement as well as static scenes.
CTA
Need to evaluate low-light usability for UAV or robotics integration?
Share your lighting conditions, target resolution, field of view, interface, and application environment. Thyraon can help review suitable embedded vision module options for your workflow.